Running Ansible Playbooks on Edge Devices
There may be cases in which you would like to be able to execute a scripts or commands in a device or on a group of devices. For example, in...
Read MorePublished on Aug 27, 2022 by Deependra Singh Shekhawat on guide flotta image-classification
The ability to detect objects is essential in a number of fields, including computer vision, robotics, and autonomous driving. With the idea of applying real-time object identification on edge devices with low inference time and high accuracy, many approaches to object detection can hardly operate on the resource-constrained edge devices.
The Flotta Image Classification tool overcomes the aforementioned limitations, by delivering amazingly precise object detection while enabling faster object detection on edge devices (like Raspberry Pi, etc.)
Workload Dependencies -
Device configuration (at least) -
Project repository can be found here.
As part of the flotta installation, prioritizing security of containers we create the user flotta and utilise that user to execute the tasks.
By default, the flotta user does not have access to any mounted devices, thus we must first make changes to provide flotta user access to the device in /dev before configuring the runtime to permit the access.
#video group access to flotta user
[root@device ~]# usermod -a -G video flotta
#expected
[root@device ~]# id flotta
uid=1001(flotta) gid=1001(flotta) groups=1001(flotta),39(video)
Following device registration, to run our workload on specific device, we need to label the device -
Use following command to add the label:
kubectl label edgedevice <device CR name> app=camera
Confirm that you have an EdgeDevice labelled with app=camera
$ kubectl get edgedevice -l app=camera
NAME AGE
ff8612a5bd1a40cca403ac1fc95cc2ad 3m
Now we will define the manifests using the same label.
Next, you will need a webcam mounted to your workload or else it fails with no device connected. Change the device id from 0 to 1/2/3… specific to your device.
Using the webcam in my system as an example mounted in /dev/video0. Make sure you specify them in the edgeworkload.yaml -
volumemounts:
- mountPath: /dev/video0
name: video
(and here)
volumes:
- name: video
hostPath:
path: /dev/video0
type: File
Specified in edgedevice.yaml.
Keep in mind the S3 api credentials should be base64 encoded in secrets.yaml, else the data sync will not initiate.
storage:
s3:
secretName: s3secret # secret containing S3 API access credentials
configMapName: s3config # configmap containing S3 API access configuration options
The default directory "../export/images/" is used for saving images.
Note: Any path that you specify in data sync configuration should be placed under /export in the container.
data:
egress:
- source: images # container folder under /export
target: images # object storage bucket folder
Note: Data is synced every 15 seconds.
First deploying the configmaps.yaml and secrets.yaml manifests following edgedevice.yaml then finally edgeworkload.yaml.
Let’s monitor EdgeDevice object in our cluster to see when the device becomes available:
$ watch -t kubectl get edgedevice ff8612a5bd1a40cca403ac1fc95cc2ad -ojsonpath="{.status.workloads}"
it should show our workload -
[{"lastTransitionTime":"2022-08-28T16:03:51Z","name":"edge-ic-workload","phase":"Running"}]
(if showing deploying phase, wait for a while as the image is being pulled)
configmaps.yaml -
data:
CAPTURE: "True" # starts detection
Setting CAPTURE: "False" will stop the camera but keep the workload running.
$ kubectl apply -f configmaps.yaml
$ kubectl delete -f edgeworkload.yaml
SSH to the device and become the flotta user to access the container and see that the images were created -
[root@fedora]$ sudo su -l flotta -s /bin/bash -c "podman exec -it edge-ic-workload-edge-ic-workload ls ../export/images/"
2022-08-29_17-32-58.jpeg 2022-08-29_17-33-03.jpeg
2022-08-29_17-32-58.json 2022-08-29_17-33-03.json
Using json for keeping track of detected objects specific to images -
{"title": "2022-08-29_17-32-58", "detected": ["tvmonitor", "laptop", "keyboard"]}
Note: Remember that the files are only produced when an object is found, thus if none are produced, this might be the case.
data:
CAPTURE: "True"
THRES: "0.25"
TIMEINT: "5"
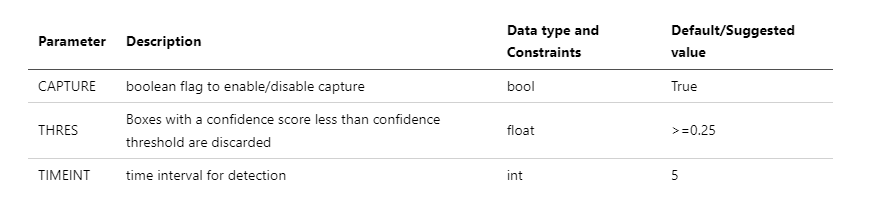
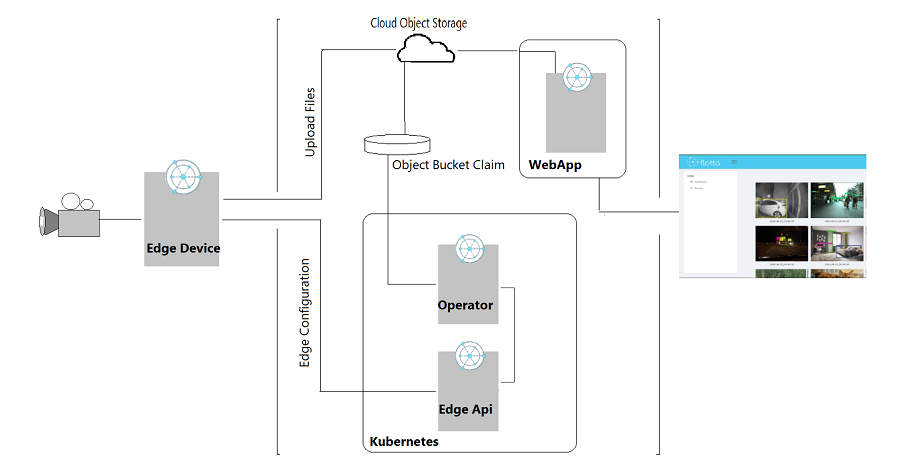
Once the edge device is configured, it begins real-time object recognition on the camera feed at the specified time interval and if an object is detected it captures and stores the images with the localization of those objects.
The functionality of the Flotta agent and Operator of bidirectional data sync between the device and storage is then used to sync these images from the device with object storage. (Learn more on Data Synchronization here)
Next the images can be browsed using flotta web app running in a cluster.
(Quick tip: Click on the images for expanded view)
Some example images detected using Flotta Image Classification Tool here.
Please feel free to share any issues or propose new ideas at GitHub Issues
There may be cases in which you would like to be able to execute a scripts or commands in a device or on a group of devices. For example, in...
Read MoreEdge Example App is an app for Flotta Edge devices, with a workload that will be deployed on the device that has two main features: Sensing the Internet (which helps...
Read MoreEdge Example App is an app for Flotta Edge devices, with a workload that will be deployed on the device that has two main features:
Read More